“Simplicity is the ultimate sophistication”- Leonardo da Vinci
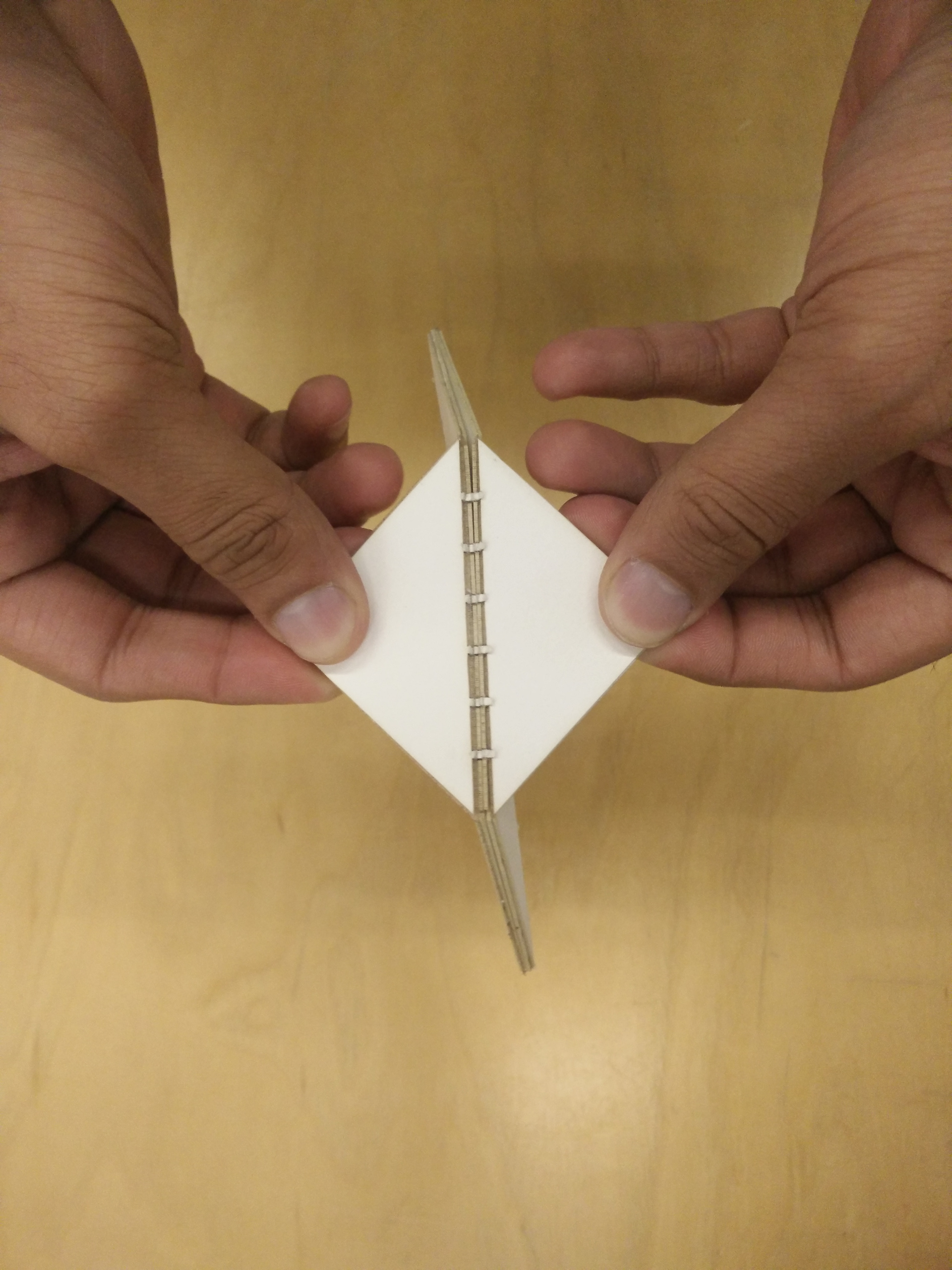
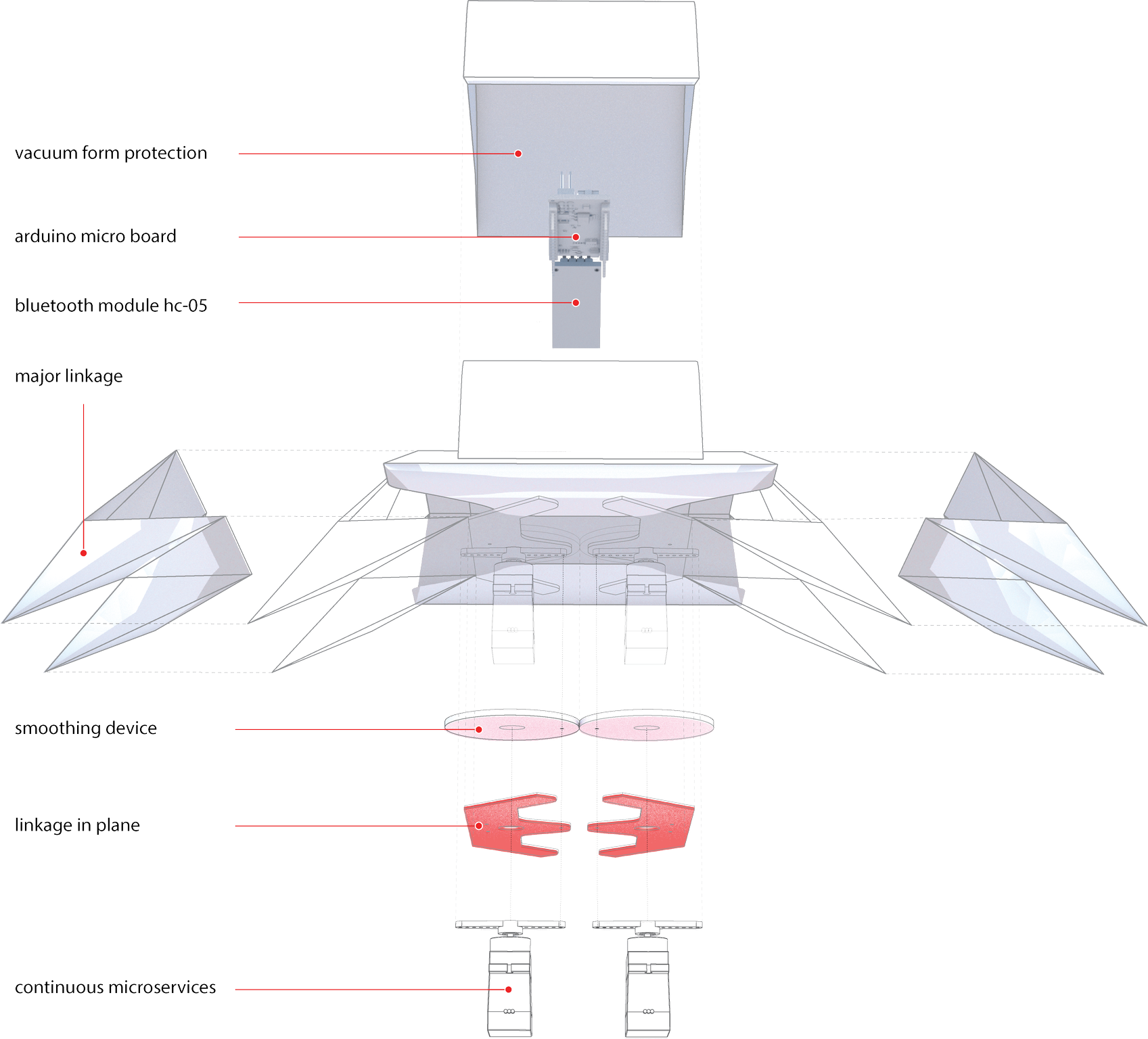
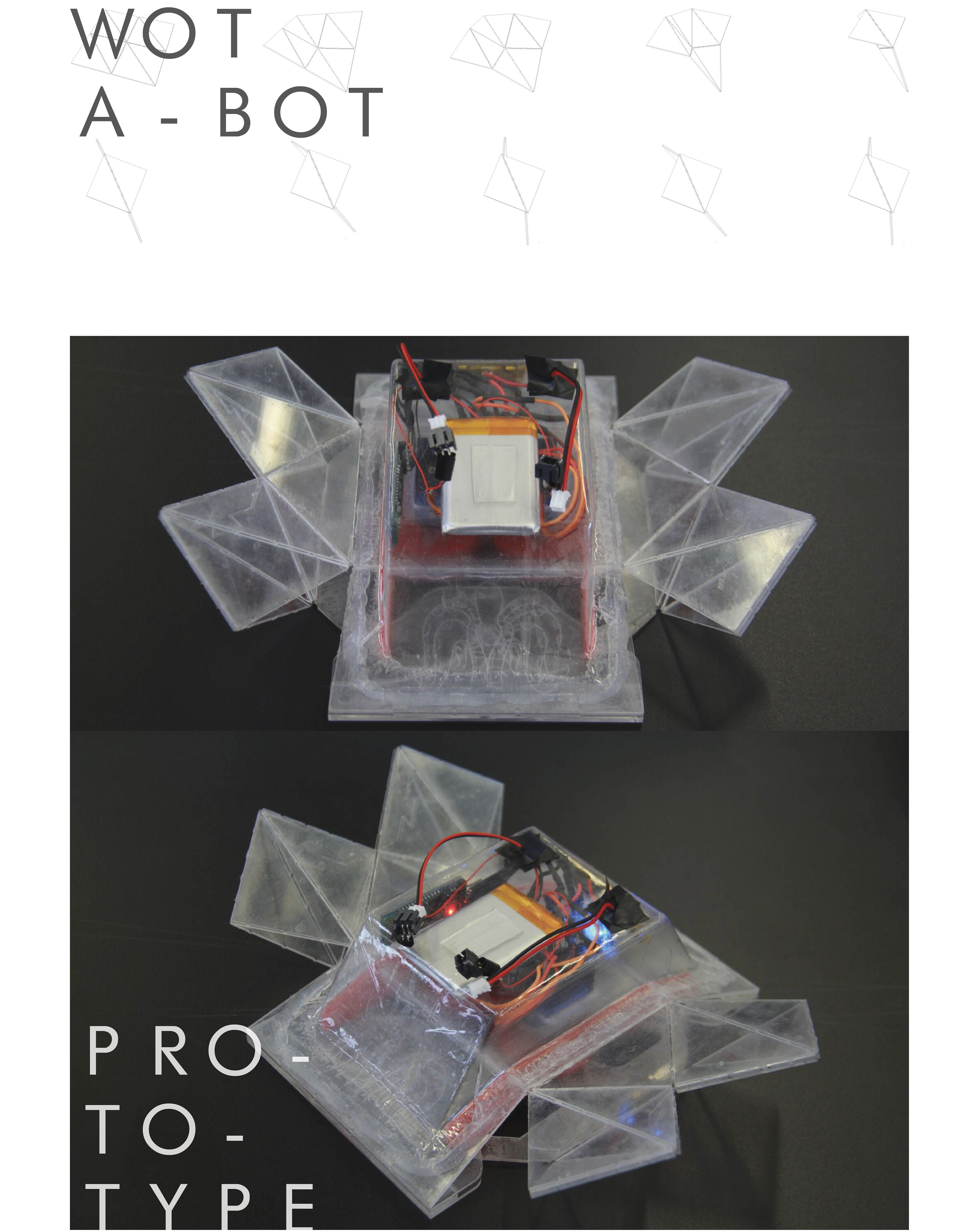
The inception of ' Wot-a-Bot' started with a simple brief to construct an amphibious robot employing clever yet innately simple paper folding techniques. The project revolved around developing a single paper fold hinge mechanism contributing to both a crawling motion as well as a swimming motion. The primary goal was to keep the geometry of the mechanical hinge as humble as possible yet at the same time extracting a sophisticated fluid output motion. The project took cues from various Bio-inspirations throughout design development with the motion of a Manta-ray as the most prominent influence. The making of wot-a-bot involved both design dexterity as well as technological skill sets and CAD modelling to map out the mechanical motions of the 6 Bar, Single degree of freedom hinge design. The main challenge however was to map and attain two different types of motor synchronizations with respect to crawling and swimming, both with their own unique set of challenges.
In its idealistic form, we envision the wot-a-bot as a unique bio inspired robot which could perhaps help in solving various marine related problems ranging from collecting water quality related data such as salinity/Ph levels to combating water pollution by picking up particle matter in water bodies.
Work produced at the Harvard Graduate school of design, Informal Robotics (2017). Project team : Sahej Bhatia, Niccolo Dambrosio, Mu Yuan.


Guiding principle
Promo video
Project video